
Other
Surgical robot
(2022)
Abstract
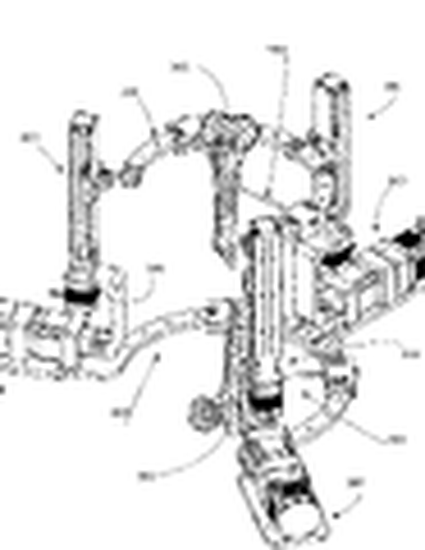
A surgical robot includes a fixed frame and a moving frame, each having an open space in a center region and may be formed as a partially open ring. The robot also includes three leg structures connecting the fixed frame and the moving frame, and enabling the moving frame to move relative to the fixed frame. The robot also includes a stabilizer for holding an anatomical structure in the open space of each frame. Each leg structure may include a linear component coupled to the moving frame, a rotary component mounted to the fixed frame, and a connector connecting between the two. Each of the linear component and the rotary component may have a rotary actuator that can be controlled by a computer. The robot may be controllable by a computer to assist a reduction procedure of long bone fractures or pelvis surgery.
Disciplines
Publication Date
July 19, 2022
Comments
U.S. Patent 11,389,256
Assignee Rowan University
Citation Information
Mohammad H. Abedin-Nasab. "Surgical robot" (2022) Available at: http://works.bepress.com/mohammad-abedin-nasab/10/