
Presentation
Design Rationale for SUBZERO
Proceedings of the 14th Early CareerTechnical Conference
(2014)
Abstract
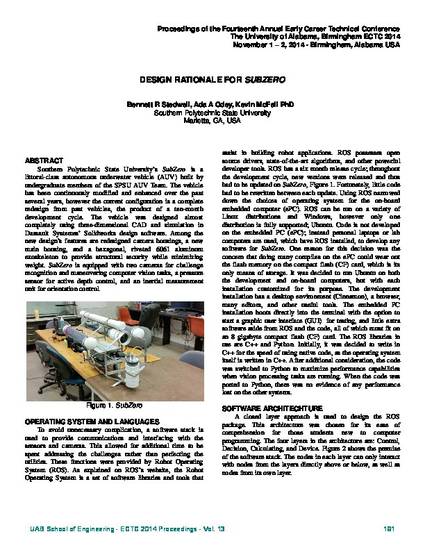
Southern Polytechnic State University’s SubZero is a littoral-class autonomous underwater vehicle (AUV) built by
undergraduate members of the SPSU AUV Team. The vehicle has been continuously modified and enhanced over the past several years, however the current configuration is a complete redesign from past vehicles, the product of a ten-month development cycle. The vehicle was designed almost completely using three-dimensional CAD and simulation in Dassault Systemes’ Solidworks design software. Among the new design’s features are redesigned camera housings, a new main housing, and a hexagonal, riveted 6061 aluminum exoskeleton to provide structural security while minimizing weight. SubZero is equipped with two cameras for challenge
recognition and maneuvering computer vision tasks, a pressure sensor for active depth control, and an inertial measurement unit for orientation control.
Disciplines
Publication Date
November, 2014
Citation Information
B. Stedwell, A. Odey and Kevin McFall. "Design Rationale for SUBZERO" Proceedings of the 14th Early CareerTechnical Conference (2014) Available at: http://works.bepress.com/kevin-mcfall/17/