
Presentation
Autonomous Go-Kart Frame
Proceedings of the 15th Early Career TechnicalConference
(2015)
Abstract
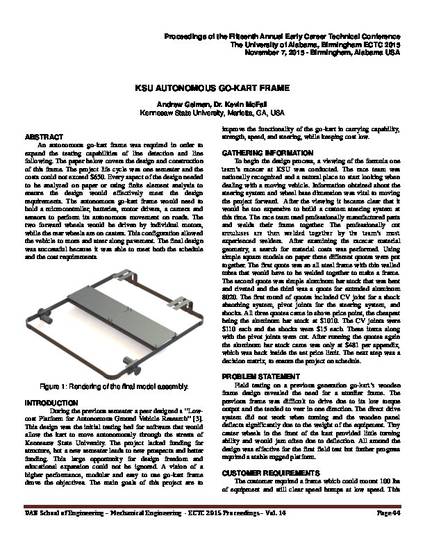
An autonomous go-kart frame was required in order to expand the testing capabilities of line detection and line
following. The paper below covers the design and construction of this frame. The project life cycle was one semester and the costs could not exceed $650. Every aspect of the design needed to be analyzed on paper or using finite element analysis to ensure the design would effectively meet the design requirements. The autonomous go-kart frame would need to hold a microcontroller, batteries, motor drivers, a camera and sensors to perform its autonomous movement on roads. The two forward wheels would be driven by individual motors,
while the rear wheels are on casters. This configuration allowed the vehicle to more and steer along pavement. The final design was successful because it was able to meet both the schedule and the cost requirements.
Disciplines
Publication Date
November, 2015
Citation Information
D. Geiman and Kevin McFall. "Autonomous Go-Kart Frame" Proceedings of the 15th Early Career TechnicalConference (2015) Available at: http://works.bepress.com/kevin-mcfall/12/