
Presentation
Effects of anthropomorphism on trust in human-robot interaction
American Psychological Association
(2017)
Abstract
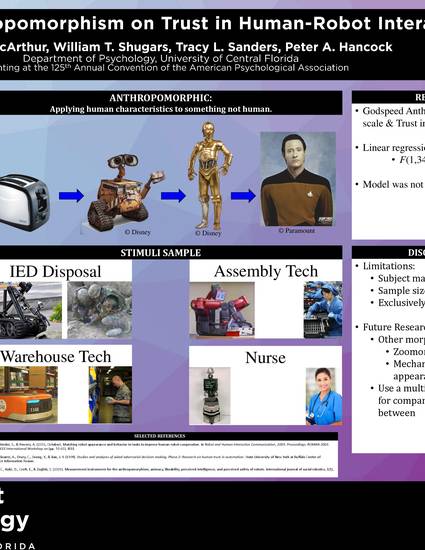
Robots are being integrated into everyday use, making the evaluation of trust in human-robot interactions (HRI) important to ensure their acceptance and correct usage (Lee & See, 2004; Parasuraman & Riley, 1997). Goetz, Kiesler, and Powers (2003) found that participants preferred robots with an anthropomorphic appearance appropriate for the social context of the task. This preference for robots with human-like appearance may be indicative of increased levels of trust and therefore, the present research evaluates the effects of anthropomorphism on trust.
Eighteen participants (Mage = 34.22, SDage = 10.55, n = 8 male, n =10 female) with subject matter expertise in automation were included in this sample in an attempt to control for pre-existing attitudes of anthropomorphic robots based on mainstream media representations. Materials included the Godspeed Anthropomorphism Subscale (Bartneck, Kulić, Croft, & Zoghbi, 2009), Trust in Automation Scale (Jian, Bisantz, Drury, & Llinas, 1998), and videos of task performers. Other measures were collected but are beyond the scope of the present analysis. Following informed consent, participants observed a video and description of robots performing two of four jobs: nurse, assembly technician, IED technician, and warehouse technician then completed anthropomorphism and trust scales. Linear regression was used to assess the ability of anthropomorphism (Godspeed subscale) to predict trust (Trust in Automation Scale) after observing a robot performing its job. The model did not reach significance F(1,34) = 0.426, p = 0.519.
Limitations of this study include the narrow population of subject matter experts, a small sample size, and exclusively looking at anthropomorphism. The consideration of zoomorphism and mechanical appearance should also be evaluated when determining effects of morphology on trust levels as they are also part of an established taxonomy of robot morphology (Yanco & Drury, 2002). Additionally, a measure that incorporates all three morphological classifications of robots should be developed to allow for comparative differences between morphological types. Replications of human-robot interaction experiments often do not use the same type of robot as the previous research due to cost limitations, custom built robots, and discontinued systems. Being able to compare robot morphology of previous research would allow for replications using robots of similar appearance.
Keywords
- Human Robot Interaction,
- HRI,
- Anthropomorphism
Disciplines
Publication Date
Summer August 4, 2017
Location
Washington D. C.
Citation Information
MacArthur, K. M., Shugars, W. T., Sanders, T., & Hancock, P. A. (August, 2017). Effects of anthropomorphism on trust in human-robot interaction. Presented at the 125th Annual meeting of the American Psychological Association, Washington, D. C.