
Presentation
Perceptions of Planned Versus Unplanned Malfunctions: A Human-Robot Interaction Scenario
Psychonomics
(2016)
Abstract
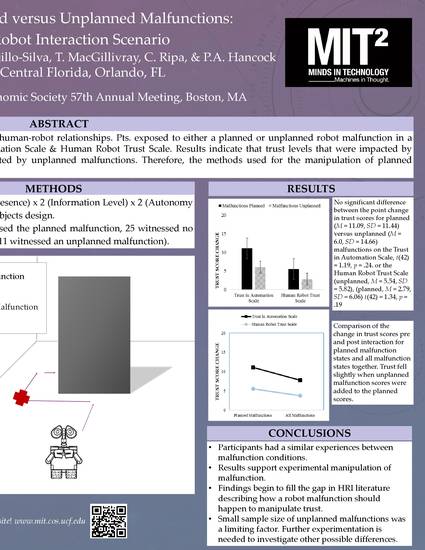
The present study investigated the effect of malfunctions on trust in a human-robot interaction scenario. Participants were exposed to either a planned or unplanned robot malfunction and then completed two different self-report trust measures. Resulting trust between planned and unplanned exposures was analyzed, showing that trust levels impacted by planned malfunctions did not significantly differ from those impacted by unplanned malfunctions. Therefore, it can be surmised that the methods used for the manipulation of the planned malfunctions were effective and are recommended for further study use.
Keywords
- HRI,
- Humon-Robot Interaction,
- Malfunction
Disciplines
Publication Date
Winter November 19, 2016
Location
Boston, MA
Citation Information
Kessler, T., MacArthur, K. R., Trujillo-Silva, M., MacGillivray, T. G., Ripa, C., & Hancock P. A. (2016, November). Perceptions of planned versus unplanned malfunctions: A human-robot interaction scenario. Poster presented at the 57th Annual Meeting of the Psychonomic Society, Boston, MA.